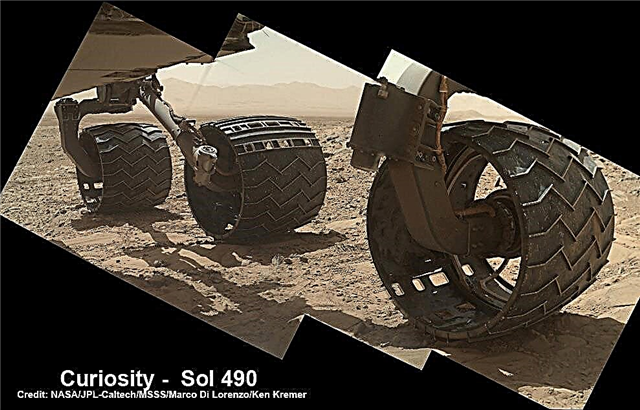
Fotomosaic prikazuje nove luknje in solze na več šestih kolesih roverja Curiosity, ki so jih povzročile nedavne vožnje po ostrih rovih marsovskih skalah na večmesečni pohod na Mount Sharp. 22, 2013 (Sol 490) so bili sestavljeni, da bi pokazali nekaj nedavnih poškodb na nekaterih njegovih šestih kolesih - najbolj opazno dve tukaj na sredini in spredaj. Zasluge: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer-kenkremer.com
Za primerjavo glejte spodaj kompleten 6-kolesni mozaik in nadaljnje kolesne mozaike
[/ napis]
Grobe robove skale na Rdečem planetu očitno prevzamejo svoj vpliv na visokotehnološka kolesa roverja Curiosity, ko se pomika proti svojemu končnemu cilju - humongous Mount Sharp - v iskanju sestavin, potrebnih za vzdrževanje potencialnih marsovskih mikrobov.
Več NASA roverjev, šest velikih aluminijastih platišč je utrpelo nekaj velikih raztrganin, raztrganin in lukenj, širokih do nekaj centimetrov - poleg številnih vdolbinic -, ko je lansko jesen pobrala vozni utrip po robustnem, s skalo napolnjenim marsovskim terenom in na merilniku kilometra prevozili 4,5 kilometra.
Poškodbe koles na 1-tonski behemoti je enostavno opaziti s pregledovanjem mozaičnih posnetkov, ki smo jih ustvarili - Glej zgoraj in spodaj - iz novo posredovanih surovih slik in primerjave s starejšimi posnetki, posnetimi na prejšnjih točkah misije. Spodaj preverite naš mozaik platišč Sol 177.
Najnovejši posnetki Marsa, ujeti tik pred božičem, članom skupine prinašajo neželeno kakršno koli praznično darilo, ki bi znanstvenikom in inženirjem morda povzročilo, da spremenijo nezemeljsko potovanje Curiosityja v nezemeljske poti, da preidejo bolj gladke terene in s tem zmanjšajo škodo v prihodnosti.
Torej je poškodba koles zagotovo obvladljiva, vendar bo potrebna pozornost.
Ekipa Marca Di Lorenza in Kena Kremerja je nova Mastcam in MAHLI surove slike koles, ujetih na Sol 490 (22. december), sestavila v sveže barvne mozaike - prikazane tukaj.


Dejansko so roverji že usmerili SUIV velikost Curiosity, da posnamejo slike 20-palčnih platišč premera z barvnimi kamerami visoke ločljivosti, ki se nahajajo na Mastu, ter kamero Mars Hand Lens Imager (MAHLI) na koncu roverja manevrirana robotska roka.
"Želimo si v celoti navesti stanje koles," je v izjavi za NASA dejal Jim Erickson iz Nasinega laboratorija za reaktivni pogon, vodja projekta za NASA Mars Science Laboratory Project.

Skupina roverjev je zagotovo pričakovala, da se bo ob skalnati poti do podnožja gore Mount Sharp nabralo nekaj obrabe - ki se na marsovsko nebo seže 5,5 km.
Toda količina ostrih robov, ki jih je naletel v pomembnem pohodu čez dno pristajalnega mesta Gale Crater Curiosity, se je očitno zbrala - kot kažejo nove slike - in posledično povzročila več škode, kot so inženirji predvidevali.
"Vdolbine in luknje so bile predvidene, vendar se zdi, da se je količina obrabe v zadnjem mesecu pospešila," je opozoril Erickson.
"Zdi se, da je povezano z vožnjo po bolj grobih terenih. Kolesa lahko utrpijo znatno škodo, ne da bi to vplivalo na sposobnost vožnje roverja. Vendar bi želeli razumeti vpliv tega tipa terena na kolesa in pomagati pri načrtovanju prihodnjih pogonov. "
Ekipa zdaj pregleduje nove posnetke koles, ki jih je pridobila, in se bo odločila, ali je treba v goro Sharp spremeniti smer.
Največ škode je morda utrpelo levo sprednje kolo.

"Poti do prihodnjih ciljev misije se lahko naredijo, da se zmanjša količina potovanja po tako grobem terenu v primerjavi z gladkejšimi tlemi v bližini," pravi NASA.
Po novem, božični vožnji danes, 26. decembra 2013 (Sol 494), števec kilometrov iz radovednosti znaša 4,6 kilometra.
Radovednost je že dosegla svoj osnovni cilj odkriti bivalno cono na Marsu, ki bi lahko podpirala marsovske mikrobe, če sploh obstajajo.
Nasin rover Curiosity je odkril dokaze, da je starodavno marsovsko jezero imelo prave kemične sestavine, ki so lahko dolgo časa vzdrževale oblike življenja mikrobov - in da so ta bivalna stanja obstajala na Rdečem planetu do novejše epohe, kot se je prej mislilo.
Trenutno raziskovalci vodijo Radovednost po 10 km (6 milj) poti do spodnjega toka gore Mount Sharp - za katero upajo, da bo dosežena nekje sredi leta 2014.

Spremljajte tukaj, ker bodo Keni nadaljevali radovednost, Chang'e-3, LADEE, MAVEN, Mars rover in novice MOM.