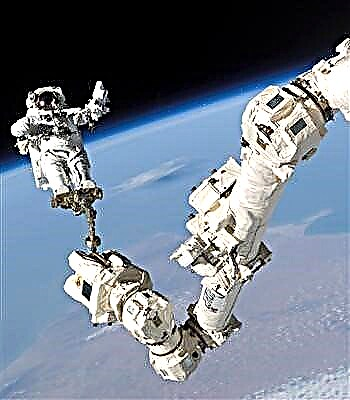
19. aprila 2001 se je na vesoljsko postajo izstrelila vesoljska ladja Endeavour's, misija STS-100, in v zalivu s koristnim tovorom je bil Canadarm2, večji in močnejši naslednik Canadarma. Sistem daljinskega upravljavca vesoljske postaje (SSRMS) je prefinjen "gradbeni žerjav" in je odgovoren za večino uspešne gradnje ISS - modula po modulu - v vesolju.
"Brez dvoma je ena najbolj kritičnih komponent na krovu postaje, ki je sodelovala pri gradnji vesoljskega plovila, ki je danes na orbiti," je dejal Mike Suffredini, vodja programa Mednarodne vesoljske postaje. »Podjetje Canadarm2 je podprlo devetindvajset misij, od katerih sta dve ujeli in privezali vozilo HTV, in v vsem tem času s popolnoma brezhibno zmogljivostjo. Brez nje ne bi mogli priti tam, kjer smo danes. "
Oglejte si galerijo slik 10 let Canadarm2 na področju vesoljske gradnje.

Canadarm2 je na ISS postavil astronavt Chris Hadfield med prvim vesoljskim plovbo. Canadarm2 je natovoril stotine ton opreme in zalog, ki jih je prevozil shuttle, in skoraj 100 vesoljskih plovil. Zadnji polet Endeavourja pozneje v tem mesecu bo 28. potovalna misija Canadarm2.

Kanadska vesoljska agencija pravi, da se bo vloga Canadarm2 na ISS-ju razširila, ko se bo orbitalni laboratorij zaključil: robotsko roko bo poleg rednega vzdrževanja pogosteje izvedel tudi "kozmični ulov", kjer bo zajel, pristajal in pozneje sprostil gostujoča vesoljska plovila , kot je to storilo s HTV. Ko se vesoljski šatl upokoji, bo komercialna vesoljska plovila za večkratno uporabo, kot sta SpaceX-ov Zmaj in Orbital's Cygnus, uporabljena za pripravo potrebščin in opreme na ISS. Canadarm2 bo zajel vsako od teh gostujočih vozil. Konec leta 2011 in v začetku leta 2012 bo Canadarm2 v samo 7 mesecih zajel serijo 6 komercialnih vesoljskih plovil, začenši z vesoljskim plovilom Dragon, ki naj bi prišlo predvidoma oktobra 2011.




Več informacij o SSRMS in kako je bilo zgrajeno:
Posadka ekspedicije 27 na krovu ISS se pokloni 10 let SSRMS: