Združena ekipa ameriških in kanadskih inženirjev je storila velik prvi korak naprej, tako da je uspešno uporabila nove, prvovrstne raziskave robotike, izvedene na Mednarodni vesoljski postaji (ISS), pri morebitnem popravilu in ponovnem polnjenju visokoletečih vesoljskih satelitov. in ki lahko nekega dne prinese prihranke milijard dolarjev za stroške vlade in komercialnih vesoljskih sektorjev.
Veseli raziskovalci obeh držav so vzklikali "Aha !!!" - po uspešni uporabi eksperimenta Robotic Refueling Mission (RRM) - privit zunaj ISS- kot preskusne postelje za tehnologijo, ki dokazuje, da lahko daljinsko vodeni robot v vakuumu prostora opravi občutljive delovne naloge, ki zahtevajo zelo natančen nadzor gibanja. Revolucionarni eksperiment z robotiko bi lahko podaljšal uporabno življenjsko dobo satelitov, ki so že na Zemljini orbiti, in ki sploh niso bili namenjeni obdelavi.
"Potem ko sem RRM posvetil večmesečni poklicni in osebni čas, je bil zame velik čustveni nalet in pomiritev, da sem prvi video tok prejel z orodjem RRM," je dejal Justin Cassidy v ekskluzivnem poglobljenem intervjuju za Space Magazine. Cassidy je vodja strojne opreme za RRM v NASA Goddard vesoljskem letalu v Greenbeltu v Marylandu.

In ekipa RRM že načrtuje izvedbo še bolj ambicioznega spremljanja poskusov, ki se začnejo že to poletje, vključno z zelo pričakovanim prenosom tekočin, da bi simulirali dejansko satelitsko polnjenje, ki bi lahko preoblikovalo aplikacije robotike v vesolju - poglejte podrobnosti spodaj!
Vse robotske operacije na postaji so kontrolorji lete oddaljeno nadzirali s tal. Namen daljinskega upravljanja in robotike je osvoboditi človeško posadko ISS, da lahko delajo na drugih pomembnih dejavnostih in izvajajo znanstvene eksperimente, ki zahtevajo človeško misel in posredovanje na kraju samem.

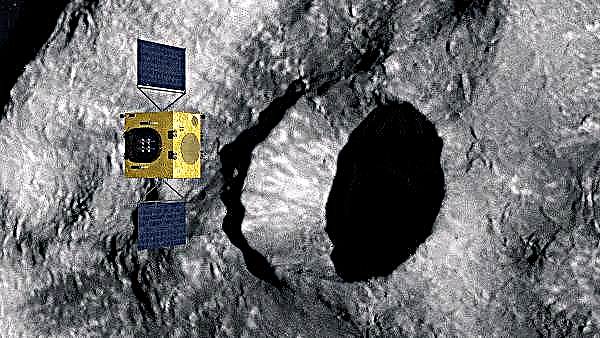
V tridnevnem obdobju od 7. do 9. marca so inženirji izvajali skupne operacije med NASA-ino eksperimentom robotske misije za dolivanje goriva (RRM) in robotskim "mojsterjem" kanadske vesoljske agencije (CSA) - robotom Dextre. Dextre uradno poimenujejo SPDM ali posebni namenski spretni manipulator.
Prvi dan so robotski operaterji na Zemlji na daljavo manevrirali 12-metrski (3,7 metra) dolgi mojster Dextre-ja v eksperimentu RRM z uporabo kanadske robotske roke (SSRMS) vesoljske postaje.
"Roka" Dextrea - tehnično znan kot "OTCM" - je nato dojela in pregledala tri različna specializirana satelitska delovna orodja, nameščena znotraj enote RRM. Izčrpne mehanske in električne ocene orodja Varnostni čep, orodja za rezanje žice in odeje za upravljanje in večfunkcijskega orodja so pokazale, da vsa tri orodja delujejo brezhibno.

„Naše ekipe so mehansko priklenile roko kanadskega robota„ Dextre “na orodje za zaščitno kapico RRM (SCT). RRM SCT je prva v orbiti enota, ki je uporabila video zmogljivost roke Dextre OTCM, "je pojasnil Cassidy.
"Na začetku delovanja orodij so kontrolorji misij mehansko poganjali električno popkovino OTCM naprej, da bi jo povezali s SCT-jevo integrirano elektronsko omarico. Ko je bila uporabljena moč za ta vmesnik, je naša ekipa lahko videla, da je na Goddardovih televizorjih z velikim zaslonom - videoposnetek SCT "prvi luč" prikazal posnetek orodja v oddelku za skladiščenje RRM (glej fotografijo).

"Naša ekipa je vpila" Ja! " da pohvalim to uspešno odpoved električnega funkcionalnega sistema. "
Dextre je nato opravil različne naloge, s katerimi je preizkusil, kako dobro je mogoče manipulirati z različnimi reprezentativnimi plinskimi okovji, ventili, žicami in tesnili, nameščenimi na zunanji strani modula RRM. Izdal je varnostne ključavnice in natančno prerezal dve izjemno tanki satelitski žici za zaklepanje - iz jekla in s premerom le 20 tisočakov palca.
»Dogodek rezanja žice je trajal le nekaj minut. Toda obe nalogi rezanja žic sta trajali približno 6 ur usklajenih, varnih robotskih operacij. Žica za zaklepanje je bila pred vletom speljana, zvita in privezana na tleh na vmesniku Ambient Cap in T-ventila, "je dejala Cassidy.
Ta vaja RRM predstavlja prvič, da je bil robot Dextre uporabljen za tehnološki raziskovalni in razvojni projekt na ISS, kar je močno razširilo njegove zmogljivosti izven robotskega vzdrževanja ogromne orbiterske postojanke.
Video napis: Dextrejeva robotska misija za gorivo: 2. dan. Drugi dan najzahtevnejše misije Dextre se je uspešno zaključil 8. marca 2012, ko je robotski mojster opravil tri dodeljene naloge. Zasluge: NASA / CSA

Skupaj so trije dnevi trajali približno 43 ur in nadaljevali nekoliko hitreje, kot smo pričakovali, saj so bili tako blizu nominalnim, kot je bilo mogoče pričakovati.
"Dneva 1 in 2 sta trajala približno 18 ur," je za Space Magazine dejal Charles Bacon, vodja / sistemski inženir operacij RRM pri NASA Goddard. »Tretji dan je trajal približno 7 ur, odkar smo vse naloge končali predčasno. Vsi trije dnevi so potekali 18 ur, ekipa pa je delala v dveh izmenah. Torej je bil čas po pričakovanjih in pravzaprav malo boljši, saj smo zadnji dan končali. "

"Naša ekipa že zadnjih nekaj mesecev postavlja oder za demonstracije RRM na orbiti," mi je povedala Cassidy. "Tako kot v gledališki produkciji imamo za kuliso veliko inženirjev, ki so podpirali razvojno podporo in so še naprej del operacij RRM na orbiti."
"Na vsaki stopnji RRM - od priprave, dostave, namestitve in zdaj operacij - me zmedejo ogromna prizadevanja, ki so jih prispevale številne različne ekipe, da so se RRM uresničili. Urad za satelitsko vzdrževanje zmogljivosti v Nasinem vesoljskem letališkem centru Goddard se je združil s vesoljskim centrom Johnson, vesoljskim centrom Kennedy (KSC), vesoljskim centrom Marshall in vesoljskim letalom pri kanadski vesoljski agenciji v St. Hubertu, Quebec, da bi RRM uresničil. "
"Uspeh operacij RRM do danes na Mednarodni vesoljski postaji (ISS) z uporabo Dextre je dokaz odličnosti Nasinih številnih organizacij in partnerjev," je pojasnil Cassidy.
Tridnevna »Naloga odstranjevanja plinske napeljave« je bila začetna simulacija izvajanja tehnik, ki so bistvene za robotsko odpravljanje okvarjenih satelitov in ponovno polnjenje sicer delujočih satelitov, da bi podaljšali življenjsko dobo delovanja za nekaj let.
Zemeljski tehniki uporabljajo armature in ventile za nalaganje vseh bistvenih tekočin, plinov in goriv v posode za shranjevanje satelitov pred izstrelitvijo, ki jih nato zaprejo, pokrijejo in običajno nikoli več ne dostopajo.
"Vpliv vesoljske postaje kot preskusne postelje uporabne tehnologije ne moremo preceniti," pravi Frank Cepollina, pridruženi direktor urada za satelitske servisne zmogljivosti (NASCO) v Nasinem vesoljskem letalskem centru Goddard za vesoljske lete v Greenbeltu, Md.
"Sveže tehnologije za satelitsko servisiranje bodo v mesecih namesto v letih prikazane v resničnem vesoljskem okolju. To je ogromno. Predstavlja dejanski napredek pri napredku vesoljske tehnologije. "
Štirje prihajajoči poskusi RRM, ki bodo predhodno postavljeni za letošnje leto, bodo pokazali sposobnost robota na daljinsko upravljanje, da odstrani ovire in napolni prazne satelitske rezervoarje za plin v vesolju, s čimer prihrani drago strojno opremo pred prezgodnjim priključitvijo na orbitalno vezo.
Časovno razporeditev prihodnjih operacij RRM je lahko zahtevna in je odvisna od razpoložljivosti Dextreja in ročice SSRMS, ki so tudi močno rezervirane za številne druge tekoče operacije ISS, kot so vesoljski popisi, vzdrževalne dejavnosti in znanstveni eksperimenti, pa tudi privezovanje in / ali razkladanje neprekinjenega. tok kritičnih ladij za dobavo tovora, kot so Progress, ATV, HTV, Zmaj in Cygnus.
Prilagodljivost je ključna za vse operacije ISS. In čeprav postajna posadka ni vključena v RRM, so njihove dejavnosti morda.
"Medtem ko se posadka sama pri svojem delovanju ne zanaša na Dextre, lahko Dextre operativno posredno vpliva na to, kar posadka zmore ali česa ne more," mi je dejal Bacon. "Na primer, med našimi operacijami RRM posadka ne more izvajati določenih telesnih vadb zaradi tega, kako bi to gibanje lahko vplivalo na gibanje Dextreja."
Tu je seznam prihodnjih operacij RRM - čakajoče omejitve urnika ISS:
* Dolivanje goriva (poletje 2012) - Ko Dextre odpre ventil za gorivo, ki je podoben tistim, ki se danes pogosto uporabljajo na satelitih, bo skozi prefinjeno robotsko cev za dovajanje goriva vanj prenašal tekoči etanol.
* Manipulacija termične odeje (TBD 2012) - Dextre bo odrezal termični odeji in zložil termalno odejo, da bi razkril vsebino pod njo.
* Odstranitev vijaka (pritrdilni element) (TBD 2012) - Dextre bo robotsko odvijal satelitske vijake (pritrdilne elemente).
* Odstranjevanje električnega pokrovčka (TBD 2012) - Dextre bo odstranil pokrovčke, ki običajno pokrivajo električno vtičnico satelita.
RRM je bil julija 2011 na orbito prepeljan v orbito tovornega prostora Space Shuttle Atlantis pri zadnji misiji shuttlea (STS-135) Nasinega tri desetletja dolgega programa shuttlea in nato nameščen na zunanjo delovno ploščad na hrbtni strežni konstrukciji ISS s pomočjo vesoljskih astronavtov. Projekt je skupno prizadevanje med NASA in CSA.
"V tem je uspeh. Z RRM resnično utiramo pot prihodnjim robotskim raziskovanjem in satelitskim servisom, «je zaključil Cassidy.

…….
24. marec (sobota): Brezplačno predavanje Kena Kremerja v New Jerseyjevem astronomskem združenju, Voorhees State Park, NJ, ob 20.30. Tema: Atlantis, program za končni konec Americas, RRM, Orion, SpaceX, CST-100 in prihodnost NASA-ovega človeškega in robotskega vesoljskega letala