Radi se osredotočamo na uspešne vesoljske misije in proslavimo tisto, kar ti uspehi dodajo k našemu znanju. Toda očitno niso vse misije popolnoma uspešne. In ker so nekatere misije na tako velikih razdaljah od Zemlje, lahko njihova usoda ostane skrivnost.
To je bilo še do nedavnega Lander Beagle 2.
Beagle 2 je prispeval Združeno kraljestvo k misiji Mars Express, ki se je začela leta 2003. Mars Express je bil sestavljen iz dveh komponent; Mars Express Orbiter in Label Beagle 2. Misija je na Mars prispela decembra 2003, ko se je Beagle 2 ločil od orbite in pristal na marsovski površini.
Namembnost Beagle 2 je bil Isidis Planitia, obsežen sedimentni bazen. Beagle 2 naj bi deloval 180 dni, z možnim podaljšanjem do enega marsovskega leta. Toda ESA po več poskusih ni mogla vzpostaviti stika z zemljo, februarja 2004 pa je ESA misijo razglasila za izgubljeno.
Beagle 2, poimenovan po ladji, s katero se je Darwin odpravil na svoje znamenito potovanje, je imel v mislih nekaj trdnih znanstvenih ciljev. Preučeval bo geologijo, mineralogijo in geokemijo pristanišča, pa tudi fizikalne lastnosti atmosfere in površja Marsa. Nameraval je preučiti tudi marsovsko meteorologijo in podnebje ter iskati biosignature. Toda vse to je bilo izgubljeno.
Bilo je veliko domneve, toda usoda Beagle 2 je bila skrivnost.
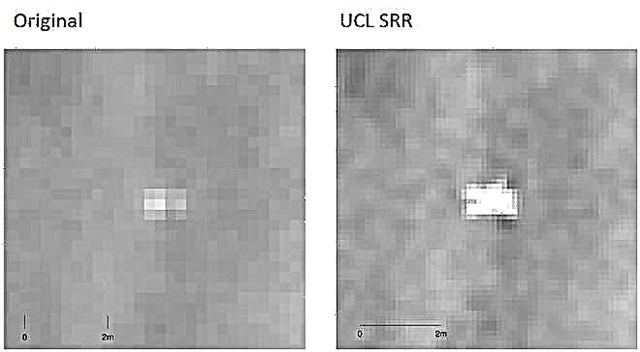
Zdaj, zahvaljujoč novemu načinu markiranja fotografij na površini Marsovca, ki ima slike z višjo ločljivostjo kot prej, je verjetna usoda Beagle 2 znana. Kaže, da je vesoljsko plovilo pristajalo tiho, kot je bilo načrtovano, vendar se sončne plošče niso pravilno namestile. To ni samo stradalo zemeljske električne energije, ampak je preprečilo delovanje antene plovila. Zato Beagle 2 ni prejel nobenega signala.

Da bi našli Beagle 2., je MRO uporabil kamero High Resolution Imaging Science Experiment (HiRise) za iskanje drugih plovil na površini Marsa, toda Beagle 2 je bilo težje najti. Po dotiku ni nikoli poslal niti kratkega signala, kar bi olajšalo iskanje.
Težavi je še ogromno pristajalno območje Beagle 2. Kraj pristanišča Beagle 2 je bil ob izstrelitvi elipsa 170 km za 100 km v planini Isidis Planitia. To je ogromno območje, na katerem lahko najdemo vesoljsko plovilo, ki je na enem mestu manj kot nekaj metrov, s kamero s skalo slike približno 0,2 m (10 palcev).
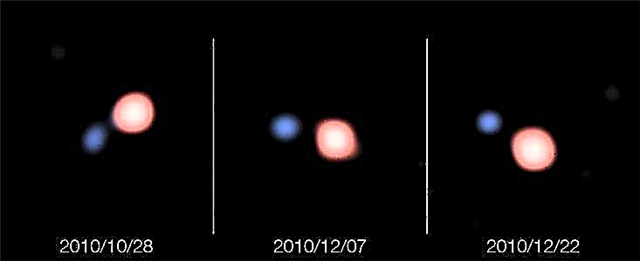
MRO uporablja svoj HiRise za iskanje Beagle 2, saj je bil izgubljen. Medtem ko se je ukvarjal s svojimi znanstvenimi cilji, je občasno posnel slike pristajalnega mesta Beagle 2. Sčasoma je zemljišče prepoznal Michael Croon, nekdanji član ekipe ESA Mars Express Orbiter. V slikah HiRise iz februarja 2013 in junija 2014 je Croon našel vizualne dokaze o zemljini in njenih sestavnih delih za vstop in spust.
Zmedeno je bilo, da se zdi, da se slika spreminja na različnih fotografijah. To bi lahko bilo zato, ker je zemljišče nameščalo svoje sončne panele kot cvetni listi, razporejeni okoli središča. Plošče bodo v različnih svetlobnih pogojih različno odsevale svetlobo, zaradi česar se zdi, da se lahko na naslednjih fotografijah spreminja lokacija. Če Beagle 2 sedi na neravni površini, bi to lahko dodalo iluzijo.
Slike HiRise so skladne z mislijo, da se plošče niso uspele namestiti, in to je smiselno tudi, če so plošče preprečile delovanje antene. Mogoče je tudi, da sonce, ki sije s plošč, samo kaže, da se niso vsi odprli.

Toda slaba novica za Beagle 2 je dobra novica za človekovo prizadevanje za raziskovanje Marsa. Nova tehnika kombiniranja slik površine Marsa prinaša fotografije s 5-krat večjo ločljivostjo, ki jo lahko zagotovi MRO. To bo olajšalo izbiro pristajalnih mest za prihodnje misije, prispevalo pa bo tudi k znanstvenim ciljem MRO.

Mars Express Orbiter še vedno deluje nad Marsom, in sicer že več kot 12 let. Med njegovimi dosežki sta odkrivanje vodnega ledu v Marsovi južni polarni kapici in odkritje metana v Marsovi atmosferi. Orbiter je izvedel tudi najbližjo letečo Marsovo luno Phobos.