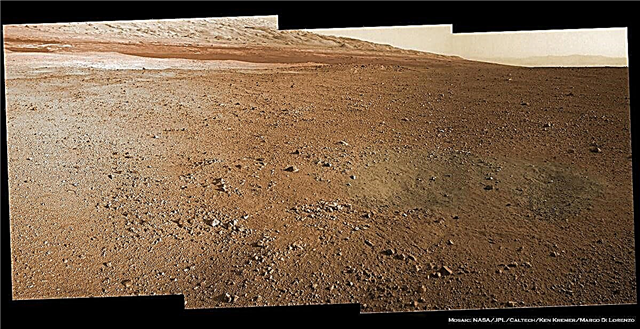
Naziv slike: Mozaik Mount Sharp znotraj pristanišča Gale Crater Curiosity. Gale Crater v megleni razdalji. Ta mozaik je bil šivan iz treh slik Navcam s polno ločljivostjo, ki jih je Curiosity vrnil na Sol 2 (8. avgust) in obarvan na podlagi slik Mastcam iz 34-milimetrske kamere. Obdelava Ken Kremer in Marco Di Lorenzo. Zasluge: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Rover Curiosity je spravil nazaj prve podrobne slike Mount Sharp, ki ponujajo osupljiv začetni pogled na njen končni cilj vožnje in je ta konec tedna sredi ključne "presaditve možganov", ki jo bo spremenila v popolnoma delujočega roverja.
Znanstvena skupina bo usmerila šestkolesnik Curiosity, da se bo po prečkanju in obsežni preiskavi tal svojega pristajalnega mesta znotraj Gale Craterja pozneje začel vzpenjati na goro Sharp pozneje, ko bo dve leti trajal osnovno poslanstvo roverjev.
Oglejte si naš mozaik, ki se osredotoča na dno Mount Sharp, s tremi slikami v polni ločljivosti, ki jih je posnela navigacijska kamera Navcam, ki se nahaja na novo postavljeni kameri in jamboru z obarvanostjo na podlagi 34-milimetrske barvne kamere Mastcam.
Radovednost se je na marsovski površini spočila skoraj ravno, toda spredaj se rahlo nagiba za 3 stopinje in slike so odvzete s tistega predhodno programiranega razgledišča, približno približno šest milj od vznožja gore Sharp.
Teren je poraščen z majhnimi kamenčki, ki lahko izvirajo iz bližnjega aluvialnega ventilatorja, skozi katerega je že davno tekla tekoča voda, menijo znanstveniki. Z opazovanji iz orbite NASA Mars Reconnaissance Orbiter so bili ugotovljeni minerali gline in sulfata v spodnjih plasteh Mount Sharp, kar kaže na mokro zgodovino. Na višjih nadmorskih višinah znanstveniki upajo, da bodo odkrili mejni sloj in znake, kaj je privedlo do "velikega dogodka razpadanja" in izgube tekoče vode na starodavni marsovski površini.
Ta konec tedna je tudi Curiosity začel prenašati spektakularne slike hi res Mastcam, ki bodo daleč presegle vse ostalo do zdaj. Tukaj je pano Mastcam 360, kot ga je doslej sestavljala NASA:

Naziv slike: prvi barvni mozaik visoke ločljivosti radovednih slik Mastcam NASA / JPL-Caltech / MSSS
Toda preden se bo robot z veliko avtomobilom dejansko lahko peljal naokoli, dosegel z njeno 7-metrsko (2 metra) dolgo roko z instrumentom in zajemal vzorce za analizo v krovnih laboratorijih, ki jih potrebuje programska oprema za izvajanje znanstvenih nalog.
Ko so bili doseženi vsi začetni cilji po pristanku, inženirji v Nasinem laboratoriju za reaktivni pogon v Pasadeni v Kaliforniji ta konec tedna porabijo 4 Sol ali marsovske dni, da bi naložili nov programski paket z imenom "R10", ki je optimiziran za površinske operacije in bo nadomestil trenutni paket "R9".
"Misijo smo zasnovali že od začetka, da bomo lahko nadgradili programsko opremo po potrebi v različnih fazah misije," je dejal Ben Cichy iz Nasinega laboratorija za reaktivni pogon v Pasadeni v Kaliforniji, glavni programski inženir misije Mars Science Laboratory. »Različica programske opreme za letenje Curiosity, ki jo trenutno uporablja [R9], je bila resnično osredotočena na pristajanje vozila. Vključuje veliko zmogljivosti, ki jih ne potrebujemo več. Omogoča nam osnovne zmogljivosti za upravljanje roverja na površini, vendar smo načrtovali, da bomo po pristanku prešli na različico programske opreme za letenje, ki je resnično optimizirana za površinske operacije. "
Programsko opremo tako na primarnem kot rezervnem računalniku postopoma nadgrajujejo postopno. Povedal je, da je bil prvi korak v petek preizkus nadgradnje.
„R10 je optimiziran za površinske operacije in ima tisto, kar si želi znanstvena ekipa. Prenesejo ga v naslednje štiri modele, da bi omogočili to fantastično misijo, "je Cichy dejal na informativnem poročanju JPL 10. avgusta. Med namestitvijo bodo stali na znanosti za naslednje štiri Sols.
"Trenutno imamo v osnovni površinski programski opremi zmožnost preverjanja zdravja instrumentov, vendar v resnici nimamo možnosti, da bi v celoti izkoristili vso to veliko strojno opremo, ki smo jo poslali na Mars."
"Torej nam programska oprema R10 omogoča, da v celoti uporabimo robotsko roko, vrtalnik, orodje za odstranjevanje prahu, uporabimo celotno verigo za vzorčenje in vbrizgamo vzorce ter jih analiziramo. Vse te vznemirljive stvari, ki jih bo naredila ta misija . "
»Radovednost je marsovski mega rover in rojen za vožnjo! R10 nam omogoča samostojno vožnjo in uporabo slik za zaznavanje nevarnosti in varno vožnjo. "
Zaenkrat nadgradnja programske opreme poteka po načrtih ta konec tedna.
Radovednost je 5. in 6. avgusta leta 2015 v kraterju Gale naredila neprimerljivo pristajanje z raketo, ki je poganjala raketo "Sky Crane", ki je s kabli spustila na površino Rdečega planeta natanko tako, kot je bilo načrtovano na ravnicah na strmem Mount Sharp le nekaj milj od osnova velikanske gore.
Mount Sharp pokriva večji del notranjosti 96 milj širokega (154 km) Gale Craterja. Vrh 3,4 km visoke (5,5 km) visoke plastne gore je višji od Mount Whitney v Kaliforniji.
Za primerjavo glej začetne širše posnetke posnetka Mount Sharp v 2 D in 3 D od Curiosityja iz kamer Hazcam z nižjo ločljivostjo tukaj
Nasin 1-tonski mega rover Curiosity je največji in najkompleksnejši robot, ki je bil kdajkoli poslan na površje drugega planeta, saj ima 10 nosilcev najsodobnejših znanstvenih instrumentov, ki tehtajo 15-krat več kot vsako predhodno veslaško vozilo. Cilj radovednosti je ugotoviti, ali je Mars kdaj zmožen podpirati življenje mikrobov, preteklih ali sedanjih, in iskati znake življenja v obliki organskih molekul.